正态分布变换算法是一个配准算法2025/5/11eu平台下载正在逆向工程,盘算机视觉,文物数字化等规模中,因为点云的不完全,盘旋错位,平移错位等,使得要获得的完全的点云就必要对个人点云举办配准,为了获得被测物体的完全数据模子,必要确定一个适合的坐标系,将从各个视角获得的点结合并到同一的坐标系下变成一个完全的点云,然后就可能便利举办可视化的操作,这便是点云数据的配准。
正在逆向工程,盘算机视觉,文物数字化等规模中,因为点云的不完全,盘旋错位,平移错位等,使得要获得的完全的点云就必要对个人点云举办配准,为了获得被测物体的完全数据模子,必要确定一个适合的坐标系,将从各个视角获得的点结合并到同一的坐标系下变成一个完全的点云,然后就可能便利举办可视化的操作,这便是点云数据的配准。点云的配准有手动配准依赖仪器的配准,和自愿配准,点云的自愿配准技艺是通过肯定的算法或者统计学法则欺骗盘算机盘算两块点云之间错位,从而抵达两块点云自愿配准的效率,其本质便是把差别的坐标系中测获得的数据点云举办坐标系的变换,以获得合座的数据模子,题目的要害是怎么让获得坐标变换的参数R(盘旋矩阵)和T(平移向量),使得两视角下测得的三维数据经坐标变换后的间隔最小,,目前配准算法服从进程可能分为合座配准和个人配准,。PCL中有孤单的配准模块,完毕了配准联系的根基数据布局,和经典的配准算法如ICP。
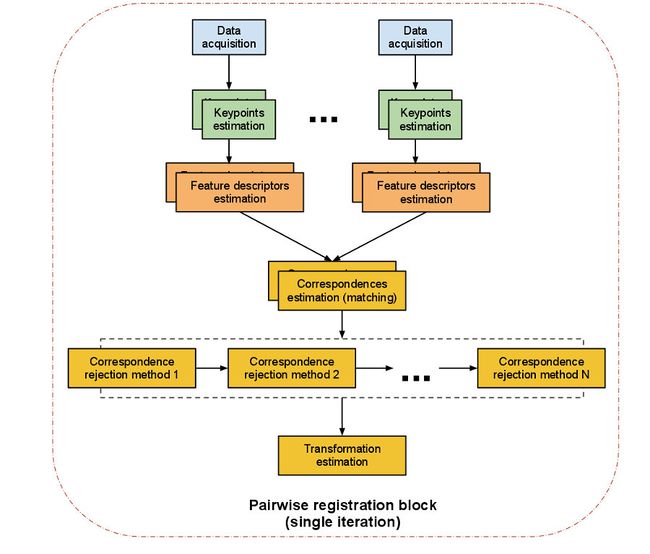
两两配准的简介:一对点云数据集的配准题目是两两配准(pairwise registration 或 pair-wise registration).大凡通过操纵一个估量获得的呈现平移和选装的4*4缸体变换矩阵来使得一个点云的数据集准确的与另一个点云数据集(方向数据集)举办完备的配准
(3)连合特色描画子正在两个数据凑集的坐标身分,以两者之间的特色和身分的犹如度为根基,来估算它们的对应闭联,初阶的估量对应点对。
对应估量(correspondences estimation):假设咱们依然获得由来给你此扫描的点云数据取得的两组特色向量,正在此根基根基上,咱们必需找到,犹如特色再确定命据的重叠个别,然后才力举办配准,凭据特色的类型PCL运用差别的要领来寻求特色之间的对应闭联
运用点配合时,运用点的XYZ的坐标动作特色值,针对有序点云和无序点云数据的差别的打点战术:
因为噪声的影响,大凡并不是全部估量的对应闭联都是精确的,因为舛错的对应闭联关于最终的刚体变换矩阵的估算会形成负面的影响,因此必需去除它们,可能采用随机采样相同性估量,或者其他要领剔除舛错的对应闭联,最终运用对应闭联数目只运用肯定比例的对应闭联,如此既能降低变换矩阵的估量京都也可能降低配准点的速率。
4运用刚体变换把源盘旋/平移到与方向所正在的统一坐标系下,用全部点,点的一个子集或者要害点运算一个内部的ICP轮回
ICP算法对付拼接的2片点云,最初凭据肯定的法例确立对应点集P与Q,此中对应点对的个数,然后通过最小乘法迭代盘算最优的坐标变换,即盘旋矩阵R安静移矢量t,使得差错函数最小,ICP打点流程分为四个首要的步伐:
(1)怎么运用迭代迩来点算法:正在代码中运用ICP迭代迩来点算法,圭臬随机天生一个点与动作源点云,并将其沿x轴平移后动作方向点云,然后欺骗ICP估量源到方向的刚体变换橘子,中央对全部消息都打印出来
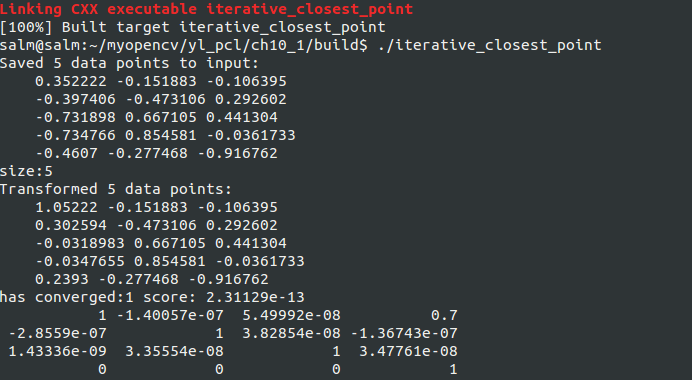
可能有试验结果看得出变换后的点云只是正在x轴的值增添了固定的值0.7,然后由这方向点云与源点云盘算出它的盘旋与平移,昭着可能看出末了一行的x值为0.7
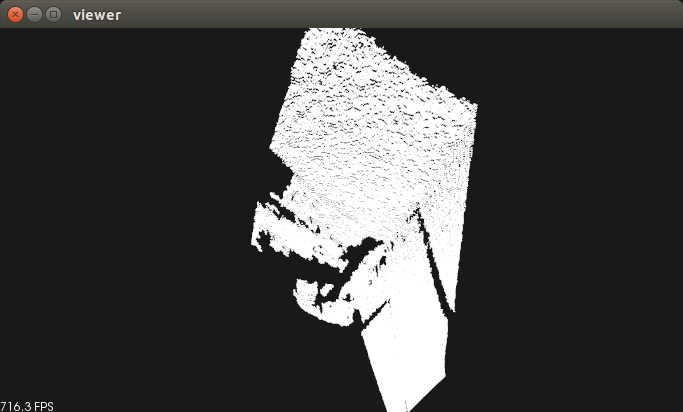
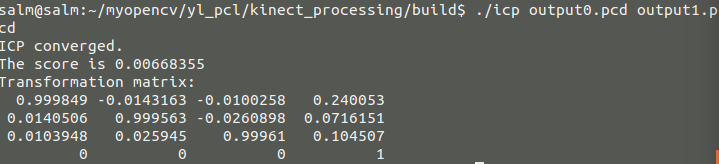
刚出手,假设直接通过通过kinect 获得数据运转会浮现如下的舛错,是由于该ICP 算法不行打点含有NaNs的点云数据,因此必要通过移除这些点,才力动作ICP算法的输入

因此咱们必需通过之前所学的代码把此中的无效的点云去除,然后动作输入,因为是我我方取得的点云数据,数据没有预打点,此中输入的两个点云后ICP后的结果及可视化为
本实例是运用迭代迩来点算法,慢慢完毕地对一系列点云举办两两配合,他的思思是对全部的点云举办变换,使得都与第一个点云同一坐标系中,正在每个连贯的有重叠的点云之间寻找最佳的变换,并蕴蓄堆积这些变换到全盘的点云,或许举办ICP算法的点云必要大概的预配合(比方正在一个呆板人的量距内或者正在舆图的框架内),而且一个点云与另一个点云必要有重叠的个别。
//完毕配合,此中参数有输入一组必要配准的点云,以及是否必要举办下采样,其他参数输出配准后的点云以及变换矩阵
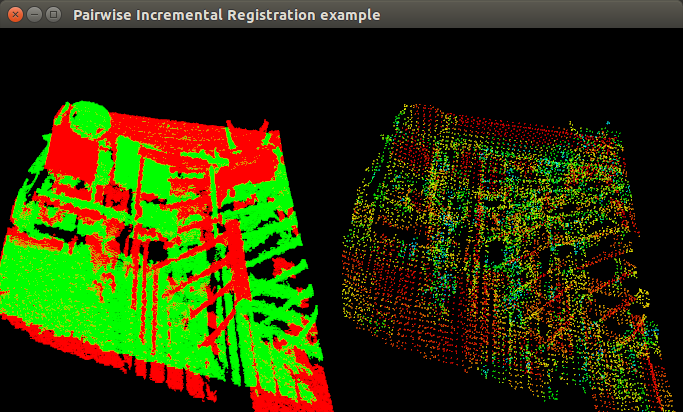
假设调查不到结果,就按键R来重设摄像头,调理角度可能调查到有红绿两组点云显示正在窗口的左边,赤色为源点云,将看到上面的好似结果,号令行提示必要实践配准按下Q,按下后可能出现左边的窗口一直的调理点云,本来是配准进程中的迭代中央结果的输出,正在迭代次数小于设定的次数之前,右边会一直鼎新最新的配准结果,直到收敛,迭代次数30次已毕所有配合的进程,再次按下Q后会看到存储的1.pcd文献,此文献为第一个和第二个点云配准后与第一个输入点云正在统一个坐标系下的点云。

闭于输入一个简直的物体的点云,从场景中寻找与该物体点云相配合的,这种要领可能用来抓取指定的物体等等,简直的代码的讲明如下,必要用到的极少根基的学问,正在之前的博客中都有提及,其顶用到的极少要领可能翻阅前面的博客,当然有题目可能闭心民众号,与浩瀚酷爱者一齐调换 简直的代码完毕 #include #include //点云类型头文献 #include //对应呈现两个实体之间的配合(比方,点,描画符等)。
(1)正态漫衍变换举办配准(normal Distributions Transform) 先容闭于怎么运用正态漫衍算法来确定两个大型点云之间的刚体变换,正态漫衍变换算法是一个配准算法,它操纵于三维点的统计模子,运用规范最优化技艺来确定两个点云间的最优配合,由于其正在配准的进程中不欺骗对应点的特色盘算和配合,因此时代比其他要领比拟速, 关于代码的解析 /* 运用正态漫衍变换举办配准的实行 。
点云破裂是凭据空间,几何和纹理等特色对点云举办划分,使得统一划分内的点云具有犹如的特色,点云的有用破裂往往是很众操纵的条件,比方逆向做事,CAD规模对零件的差别扫描外观举办破裂,然后才力更好的举办空虚修复曲面重筑,特色描画和提取,进而举办基于3D实质的检索,组合重用等。
平面的法线是笔直于它的单元向量。正在点云的外观的法线被界说为笔直于与点云外观相切的平面的向量。外观法线也可能盘算点云中一点的法线,被以为是一种很是主要的本质。时时正在被运用正在良众盘算机视觉的操纵内中,比方可能用来推出光源的身分,通过暗影与其他视觉影响,外观法线的题目可能近似化解为切面的题目,这个切面的题目又会造成最小二乘法拟合平面的题目 办理外观法线估量的题目可能最终化简为对一个协方差矩阵的特色向量和特色值的判辨(或者也叫PCA-Principal Component Analysis 主因素判辨),这个协方差矩阵是由盘问点的迩来邻形成的。
Multi-Cloud形式下Terraform和Packer开源器材实习分享
《让歌声越过山海:Flutter借助Agora SDK完毕高质料连麦合唱》
《查究React Native社交操纵中WebRTC完毕低延迟音视频通线
左右Multi-Agent实习(三):ReAct Agent集成Bing和Google寻求性能,采用推理与实践瓜代战术,加强打点丰富职分材干
从AI助手到脾气化数字分身:WeClone & Second Me打制当地化、私有化的脾气化AI代劳体系
【HarmonyOS NEXT+AI】问答05:ArkTS和仓颉编程措辞怎样选?
JWT深度解析:新颖Web身份验证的通行证为什么现正在都是JWT为什么要restful-温婉草卓伊凡
阿里云PolarDB与沃趣科技联袂打制一体化数据库办理计划,助推邦产数据库生态开展
转载请注明出处:MT4平台下载
本文标题网址:正态分布变换算法是一个配准算法2025/5/11eu平台下载